Hinges
Jump to navigation
Jump to search






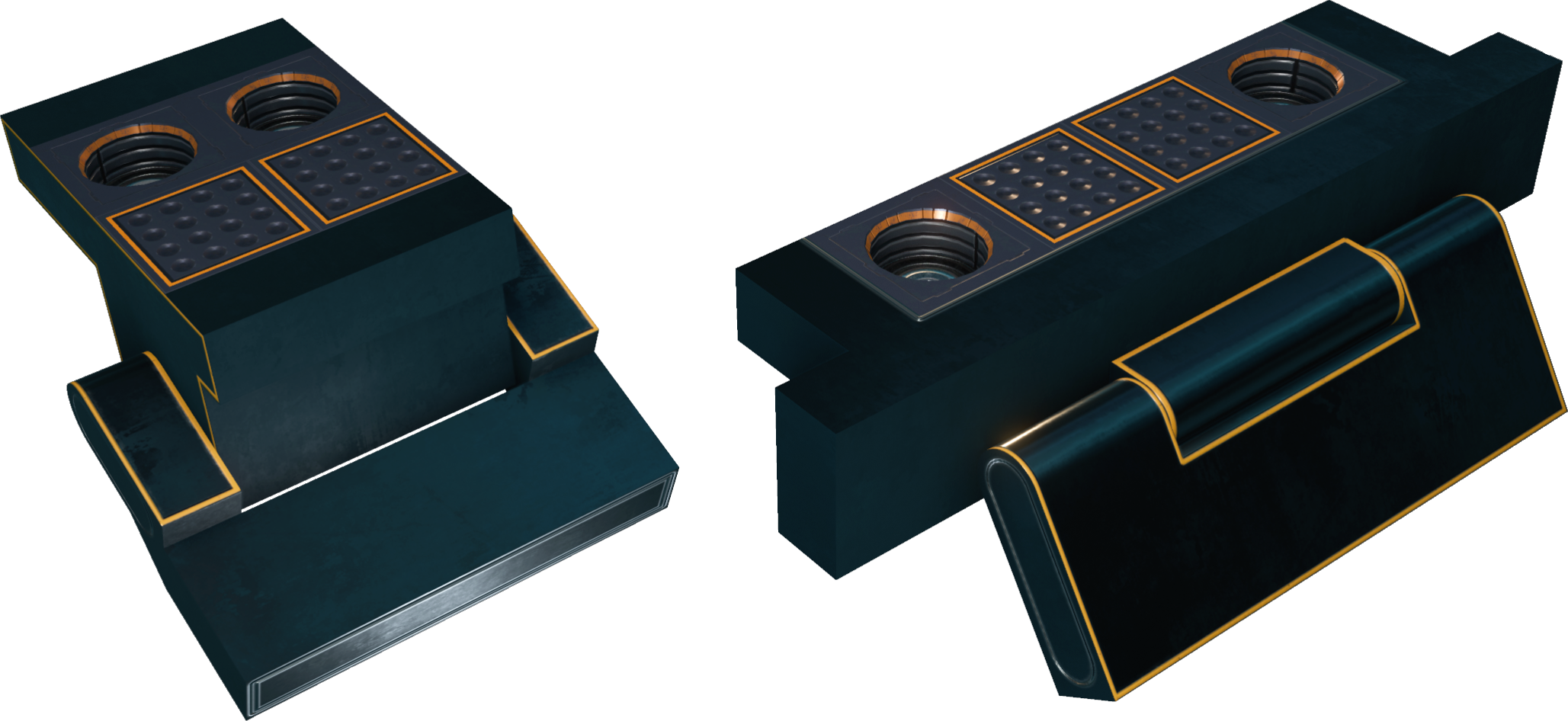 Two of the many types of hinges available
Two of the many types of hinges available


Hinges
Type Utility machinery
Function Joint motor
Hinges are devices used for creating turning, sliding and opening mechanisms such as doors, hatches and sliding doors.
Basic information
Hinges are most frequently interacted with via a button or YOLOL script, but can also be interacted with directly via the universal tool. They are not especially strong, and cannot be used to mount thrusters to a ship; nor do any of them have provisions to transfer power or propellant beyond the joint itself.
Gallery
.png)
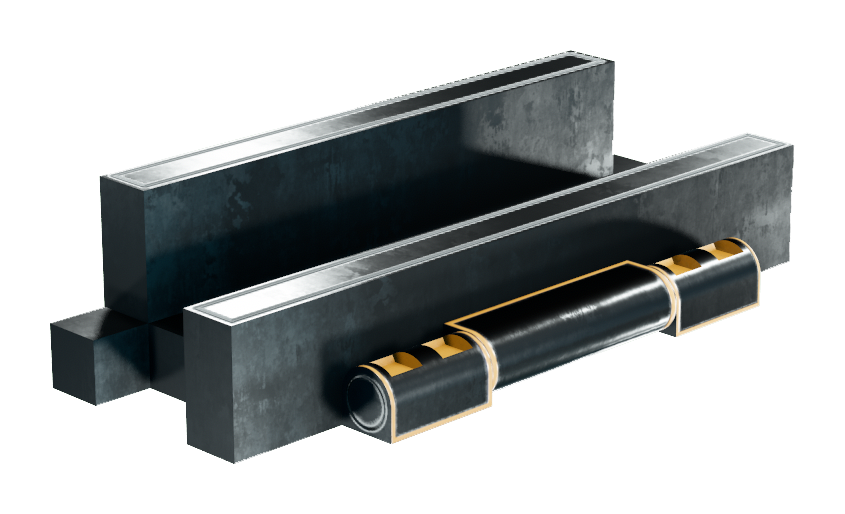
Hinge (C-profile)
Size 48×144×36 cm
Mass 1,419 kg kg
Volume 142.7 kv kv
Corrosion resistance 400
Input / Output
Electric input 5 e/s
Sockets 2
Modular interfaces 2
Composition
.png)
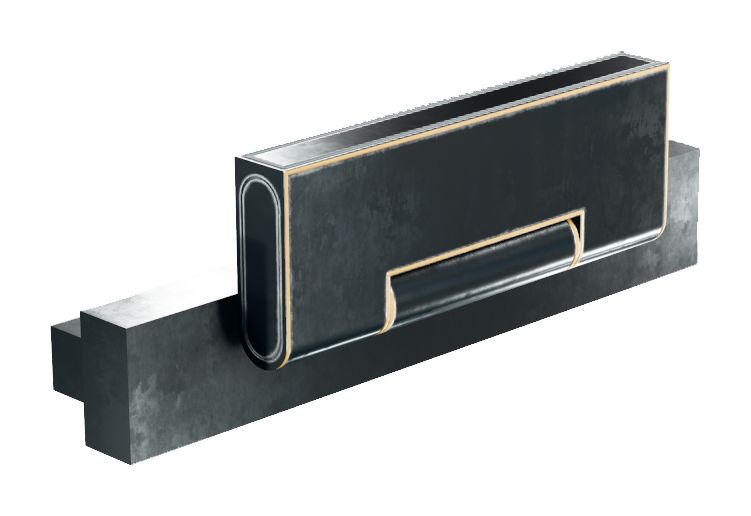
Hinge (L-profile)
Size 24×144×36 cm
Mass 1,148 kg kg
Volume 115.3 kv kv
Corrosion resistance 400
Input / Output
Electric input 5 e/s
Sockets 2
Modular interfaces 2
Composition
.png)
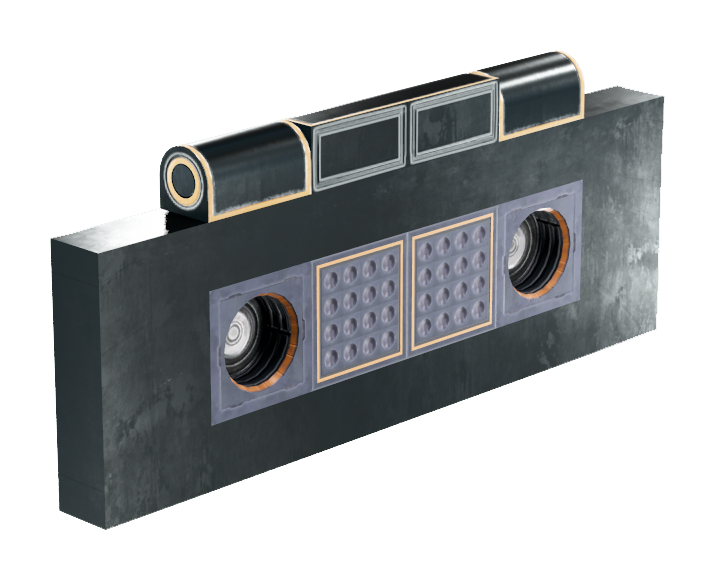
Hinge (A-1)
Size 48×48×12 cm
Mass 331 kg kg
Volume 33.3 kv kv
Corrosion resistance 425
Input / Output
Electric input 5 e/s
Sockets 1
Modular interfaces 1
Composition
.png)
Hinge (A-2)
Size 48×144×12 cm
Mass 940 kg kg
Volume 94.4 kv kv
Corrosion resistance 435
Input / Output
Electric input 5 e/s
Sockets 2
Modular interfaces 2
Composition
.png)
Hinge (B-1)
Size 48×48×12 cm
Mass 331 kg kg
Volume 33.3 kv kv
Corrosion resistance 425
Input / Output
Electric input 5 e/s
Sockets 1
Modular interfaces 1
Composition
.png)
Device fields
| YOLOL field | Description | Range |
|---|---|---|
| DoorOpenState | Input field for requested door state. 0 is closed, 1 is fully open. | [0,1] |
| DoorCurrentState | Reports the current position of the door, on the same scale as DoorOpenState | [0,1] |
| EndAngle / EndPosition | The rotation/position the joint should be at when DoorOpenState is 1. Is measured in percents(%) relative to the maximum possible open state for prismatic joints, and degrees in hinge joints. | |
| StartAngle / StartPosition | The rotation/position the joint should be at when DoorOpenState is 0. Is measured in percents(%) relative to the maximum possible open state for prismatic joints, and degrees in hinge joints. | |
| TargetVelocity | The maximum velocity the joint will reach. Different joint devices have different velocity limits, and might not be able to reach the configured velocity. |
To learn more about how to use fields, consult these wiki pages: