Difference between revisions of "Sliders"
Jump to navigation
Jump to search
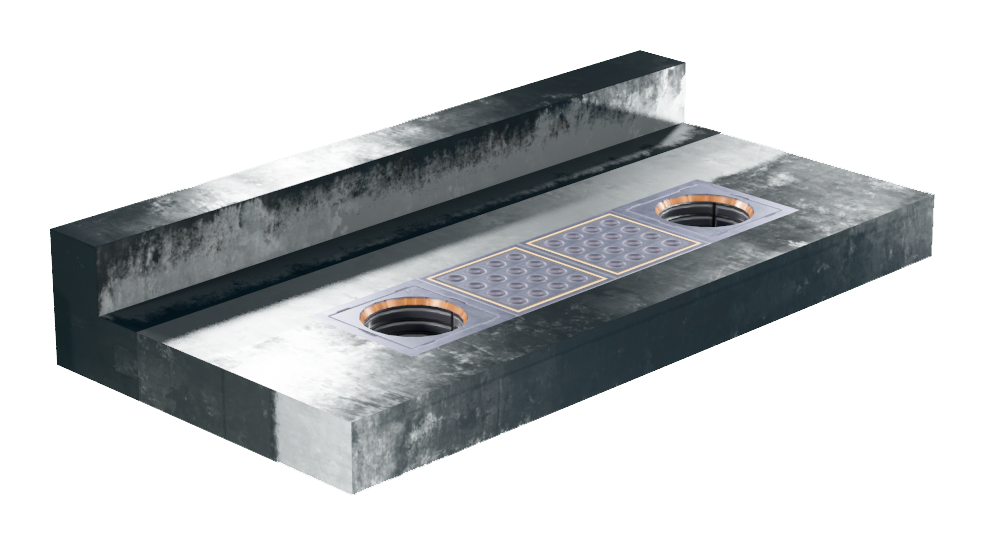 The basic version of the slider
The basic version of the slider
(Redirected page to Hinges) Tag: New redirect |
m (Removed redirect to Hinges) Tag: Removed redirect |
||
| Line 1: | Line 1: | ||
{{Otherlang2 | |||
}}{{SB Infobox Begin | |||
|{{SB Infobox Header | |||
|image=[[Image:Slider (basic).png]] | |||
|factionLogo= | |||
|caption=The basic version of the slider | |||
|name= | |||
|border=none | |||
}} | |||
|{{SB Infobox Device General Information | |||
|type=Utility machinery | |||
|function=Sliding motor | |||
|availability=[[Luxury Items]] | |||
|size=<ul><li>72×144×24 cm ''(basic)''</li><li>72×144×48 cm ''(C-profile)''</li><li>60×144×24 cm ''(L-profile)''</li><li>60×144×24 cm ''(T-profile)''</li></ul> | |||
|mass=<ul><li>1,454.9 kg ''(basic)''</li><li>1,984.9 kg ''(C-profile)''</li><li>1,403.3 kg ''(L-profile)''</li><li>1,317.7 kg ''(T-profile)''</li></ul> | |||
|volume=<ul><li>146.22 kv ''(basic)''</li><li>199.49 kv ''(C-profile)''</li><li>141.04 kv ''(L-profile)''</li><li>132.43 kv ''(T-profile)''</li></ul> | |||
|corrosionResistance=415 | |||
|suppressUnitsKg=1 | |||
|suppressUnitsKv=1 | |||
|subComponents= | |||
}} | |||
|{{SB Infobox Device IO | |||
|electricIn=~5 e/s | |||
|electricOut= | |||
|energyCapacity= | |||
|coolantIn= | |||
|coolantOut= | |||
|coolantCapacity= | |||
|coolantRefresh= | |||
|heatGeneration= | |||
|heatDissipation | |||
|propellantIn= | |||
|propellantOut= | |||
|propellantCapacity | |||
|fuelIn= | |||
|fuelOut= | |||
|fuelCapacity | |||
|sockets=2 | |||
|YOLOLchips= | |||
|modInterfaces=2 | |||
|deviceInterfaces= | |||
}} | |||
|{{SB Infobox Device Construction | |||
|headerOverride | |||
|bastium=70% | |||
|ajatite=10% | |||
|kutonium=5% | |||
|tengium=15% | |||
}} | |||
}}<section begin=summary/>Sliders are motors that produce lateral motion. They are functional siblings of [[Hinges|hinges]].<section end=summary/> | |||
== Basic information == | |||
Sliders are most frequently interacted with via a [[Buttons|button]] or [[YOLOL]] script, but can also be interacted with directly via the [[Universal tool|universal tool]]. They are not especially strong, and cannot be used to mount [[Thrusters|thrusters]] to a ship; nor do any of them have provisions to transfer power or propellant beyond the joint itself. | |||
== Gallery == | |||
<gallery mode="packed" heights="100px"> | |||
Image:Slider (basic).png|''C-profile slider'' | |||
Image:Slider (c-profile).png|''C-profile slider'' | |||
Image:Slider (l-profile).png|''L-profile slider'' | |||
Image:Slider (t-profile).png|''Slider A (48×48)'' | |||
</gallery> | |||
== Device fields == | |||
{|class="wikitable" | |||
! YOLOL field | |||
! Description | |||
! Range | |||
|- | |||
! '''DoorOpenState''' | |||
| Input field for requested door state. 0 is closed, 1 is fully open. | |||
| [0,1] | |||
|- | |||
! '''DoorCurrentState''' | |||
| Reports the current position of the door, on the same scale as ''DoorOpenState'' | |||
| [0,1] | |||
|- | |||
! '''EndAngle / EndPosition''' | |||
| The rotation/position the joint should be at when ''DoorOpenState'' is 1. Is measured in percents(%) relative to the maximum possible open state for prismatic joints, and degrees in hinge joints. | |||
| | |||
|- | |||
!'''StartAngle / StartPosition''' | |||
| The rotation/position the joint should be at when ''DoorOpenState'' is 0. Is measured in percents(%) relative to the maximum possible open state for prismatic joints, and degrees in hinge joints. | |||
| | |||
|- | |||
! '''TargetVelocity''' | |||
| The maximum velocity the joint will reach. Different joint devices have different velocity limits, and might not be able to reach the configured velocity. | |||
| | |||
|} | |||
To learn more about how to use fields, consult these wiki pages: | |||
* [[Universal tool|Universal Tool]] | |||
* [[Data networks|Data networks]] | |||
* [[YOLOL|YOLOL]] | |||
[[Category:Devices and machines|Hinges]] | |||
Revision as of 10:50, 3 June 2021
.png)
Sliders
Type Utility machinery
Function Sliding motor
Availability Luxury Items
Size
- 72×144×24 cm (basic)
- 72×144×48 cm (C-profile)
- 60×144×24 cm (L-profile)
- 60×144×24 cm (T-profile)
Mass
- 1,454.9 kg (basic)
- 1,984.9 kg (C-profile)
- 1,403.3 kg (L-profile)
- 1,317.7 kg (T-profile)
Volume
- 146.22 kv (basic)
- 199.49 kv (C-profile)
- 141.04 kv (L-profile)
- 132.43 kv (T-profile)
Corrosion resistance 415
Input / Output
Electric input ~5 e/s
Sockets 2
Modular interfaces 2
Composition
Sliders are motors that produce lateral motion. They are functional siblings of hinges.
Basic information
Sliders are most frequently interacted with via a button or YOLOL script, but can also be interacted with directly via the universal tool. They are not especially strong, and cannot be used to mount thrusters to a ship; nor do any of them have provisions to transfer power or propellant beyond the joint itself.
Gallery

C-profile slider

C-profile slider
L-profile slider
Slider A (48×48)
.png)
.png)
.png)
Device fields
| YOLOL field | Description | Range |
|---|---|---|
| DoorOpenState | Input field for requested door state. 0 is closed, 1 is fully open. | [0,1] |
| DoorCurrentState | Reports the current position of the door, on the same scale as DoorOpenState | [0,1] |
| EndAngle / EndPosition | The rotation/position the joint should be at when DoorOpenState is 1. Is measured in percents(%) relative to the maximum possible open state for prismatic joints, and degrees in hinge joints. | |
| StartAngle / StartPosition | The rotation/position the joint should be at when DoorOpenState is 0. Is measured in percents(%) relative to the maximum possible open state for prismatic joints, and degrees in hinge joints. | |
| TargetVelocity | The maximum velocity the joint will reach. Different joint devices have different velocity limits, and might not be able to reach the configured velocity. |
To learn more about how to use fields, consult these wiki pages: